Nowoczesne podejście do pomiarów terenowych
Nowoczesne podejście do pomiarów terenowych
W ostatnim czasie wszyscy borykamy się z dużą aktywnością jonosfery, która sprawia że nasze pomiary wydłużają się, a w skrajnych wypadkach wymagają nawet powtórnego wyjazdu w teren.
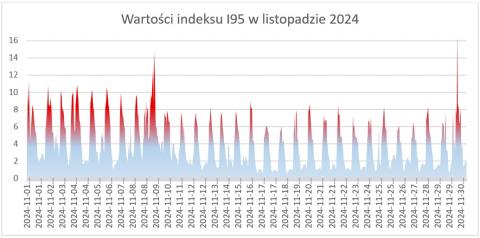
Żródło: profil FB ASG Eupos
Producenci sprzętu prześcigają się w zachwalaniu płyt GNSS, ich odpornością na zakłócenia itp.
Ale nawet najlepsza płyta GNSS, najbardziej odporna na zakłócenia nie zmienia nic, gdy system wystawi nam błędną stację referencyjną i mamy stałą wartość przesunięcia dla naszych pomiarów, lub jeśli mamy daleko do najbliższej, fizycznej stacji referencyjnej.
Często usłyszymy, że trzeba się sprawdzać, wykonywać pomiary z kontrolą po reinicjalizacji. I to wszystko jest prawdą, ale gdy mamy do pomiaru kilkaset drzew w pasie drogowym – ciągłe reinicjalizacje mogą użytkownika zirytować.
W ostatnich dniach wykonaliśmy pomiar 5 km pasa drogowego pod kątem inwentaryzacji drzew. Pomiary wykonywane były w piku jonosfery, ale mimo to udało się osiągnąć świetne wyniki a sam pomiar trwał – 45 min. Jak to możliwe? Śpieszę z odpowiedzią.
Pomiar zaczęliśmy od założenia bazy. Mniej więcej w połowie odcinka, który podlegał pomiarowi, była bardzo ładna polana, na której mogliśmy rozstawić statyw i ustawić odbiornik.

Za bazę posłużył odbiornik Stonex S900+. Pomiar współrzędnych bazy wykonaliśmy w oparciu o ASG EUPOS – pomiary RTN.
Wykonaliśmy cztery reinicjalizacje w schemacie:
- pomiar punktu,
- reinicjalicjalizacja i pomiar punktu.
- wyłączenie odbiornika, włączenie
- pomiar punktu,
- reinicjalizacja i pomiar punktu.

Tabela powyżej prezentuje wyniki jakie zostały uzyskane dla poszczególnych reinicjalizacji. Takie wyniki pozwalają zaufać wyznaczonej współrzędnej bazy i kontynuować pomiary. Tak utworzona baza staje się naszą stacją referencyjną. Przypomnę, że w tym zadaniu do pomierzenia były drzewa w pasie drogowym na odcinku 5km. Założenie bazy zajęło około 5 minut. Lokalizacja bazy znajduje się mniej więcej w połowie odcinka, co oznacza dla nas, że wektor między Rover a Baza będzie nie większy niż 2.5km-3km. Warto tu przypomnieć istotę pomiarów różnicowych:
Do błędów eliminowanych podczas pomiarów różnicowych (w tym RTK/RTN) zaliczamy:
- Błąd zegara satelity i odbiornika
- Błędy orbit satelitów
- Opóźnienie jonosferyczne
- Opóźnienie troposferyczne
Krótki wektor ma nam dać identyczne warunki jono – i troposfery i całkowią eliminację błędów. Dzięki czemu nasze pomiary nie są obarczone błędami wynikającymi min. z wysokiej aktywności słonecznej. Warto tutaj dodać, że każdy odbiornik Stonex może byc wykorzystany jako Baza. Każdy klient Stonex Polska/Czerski Trade Polska ma dostęp do serwera, w ramach którego taka baza taka działa bez problemu w protokole NTRIP.
No dobrze, założenie bazy zajęło około 5 minut. To w jaki spoób zostały pomierzone drzewa na odcinku 5 km w pasie drogowym, że całość pomiaru trwała 45 minut?
Zestaw jaki został wykorzystany do tego pomiaru to:
- Skaner X120Go wraz z akcesorium: plecak RTK
- Hulajnoga elektryczna

Pomiar realizowany był poprzez jazdę po drodze wojewódzkiej ze stałą prędkością 15km/h po obu stronach jezdni (łącznie przejechano ponad 10km - co przekłada się na ponad 40min jazdy). W tym czasie na kontrolerze użytkownik widział cały czas podgląd danych, status RTK oraz błędy wyznaczenia pozycji FIX. Przejazd przez las oznaczał oczywiście chwilowe straty rozwiązania FIX – ale dzięki bliskiej i stałej bazie mieliśmy pewność, że kązdy status FIX jest uzyskany w oparciu o bliską, stałą stację z prawidłowo wyznaczonymi współrzędnymi. Dzieki wbudowanemu IMU i algorytmowi SLAM nie musieliśmy się martwić chwilowymi brakami FIX – pomiar odbywał się w sposób ciągły, co pozwala na prawidłowe zbudwoanie modelu 3D i przeniesienie obiektu rzeczywistego do świata wirtulanego – przenosimy teren do biura.
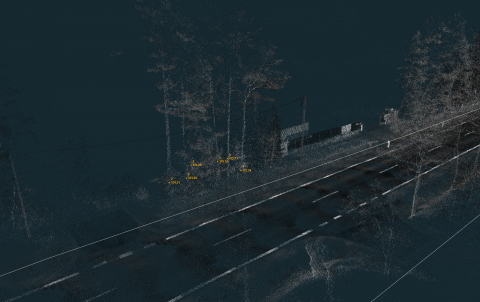
Poniżej przedstawiam kilka zrzutów ekranu z modelu, który powstał. Dla tego obszaru dysponowaliśmy dodatkowo wynikami pomiarów z drona sprzed kilku miesięcy, dzięki czemu mogliśmy zweryfikować dokładoność pozyskanego modelu na takich elementach jak słupy linii napowietrznej, budynki, ogrodzenia. Różnice współrzędnych nie przekraczały 5 cm. Chmury nie były ze sobą wyrównywane. Na potwierdzenie spójności danych przekrój przez ogrodzenie oraz słup w prezentacji na dwóch chmurach – pomiar dronem z lipca 2024 (niebieska chmura) oraz grudniowy pomiar z wykorzystaniem X120Go+Plecak (czerwona chmura)

Porównanie chmury punktów z lipca 2024- pozyskanej z drona oraz X120Go – pozyskanej w grudniu 2024
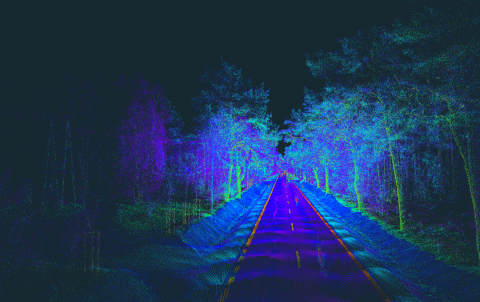
Prezentacja chmury punktów:
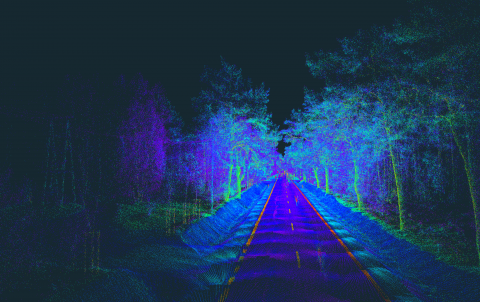
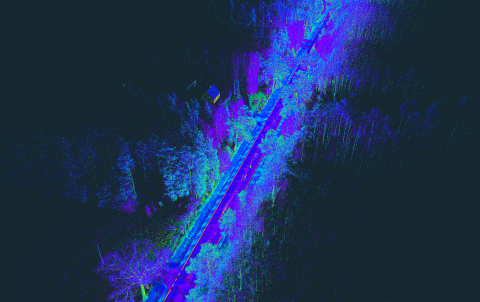
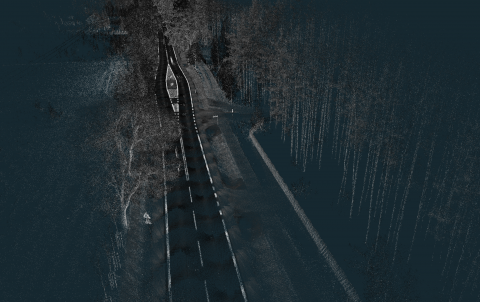
Prezentacja chmury odbywa się wg. Intensywności odbicia. Dzięki czemu chmura jest pełniejsza. W wyniku kolorowania chmury punktów tracimy na gęstości chmury. Dla tego konkretnego zadania lepszym wyborem jest niekolorowanie chmury punktów ze zdjęć.
W wyniku pomiaru, który został wyżej opisany pozyskaliśmy chmurę punktów w prawidłowej georeferncji o wystarczającej dokładności dla potrzeb pomiaru drzew w pasie drogowym. Pozyskana chmura punktów sięga od kilku do kilkudziesięciu metrów szerzej niż pas drogowy, dzięki czemu mamy pewność, że wszystkie drzewa, które miały zostać pomierzone mają swoją reprezentację na chmurze punktów. Pozostaje więc opracowanie biurowe, wynikiem którego będą współrzędne pomierzonych drzew.W zależności od preferencji możemy odczytywać współrzędne narzędziami CAD w Cube-3D rysując po chmurze punktów lub tworząc cięcia 2D umożlwiające wskazywanie środków drzew w dowolnym programie typu CAD.